Example10_13.m
Compute the mean and standard deviation of the steady state spring solution

with coefficients Q = [m,c,k]. Here we compare three methods:
* Monte Carlo sampling as discussed in Section 9.2 with mean and variance at omega_f given by (9.20)
* Deterministic solutions y(omega_F,\bar{q})
* Discrete projectionclear all % % K = 9; % Number of tensored Hermite basis functions Psi(q) N_MC = 1e5; % Number of Monte Carlo samples M = 10; % Number of Gauss-Hermite quadrature points used to approximate discrete projection
Input the parameter means and standard deviations.
mu_m = 2.7; mu_c = 0.24; mu_k = 8.5; sigma_m = 0.002; sigma_c = 0.065; sigma_k = 0.001;
Compute N_MC samples for each of the parameters and construct the grid for omega_F.
q = zeros(N_MC,3); q(:,1) = mu_m + sigma_m*randn(N_MC,1); q(:,2) = mu_c + sigma_c*randn(N_MC,1); q(:,3) = mu_k + sigma_k*randn(N_MC,1); d_omega = 0.005; omega = [0.5:d_omega:2.7]; N_omega = length(omega);
Input the M=10 Gauss-Hermite quadrature points and weights from a table.
zvals = sqrt(2)*[-3.4361 -2.5327 -1.7566 -1.0366 -0.3429 0.3429 1.0366 1.7566 2.5327 3.4361]; weights = (1/sqrt(pi))*[7.6404e-6 1.3436e-3 3.3874e-2 2.4014e-1 6.1086e-1 6.1086e-1 2.4014e-1 3.3874e-2 1.3436e-3 7.6404e-6]; mvals = mu_m*ones(size(zvals)) + sigma_m*zvals; cvals = mu_c*ones(size(zvals)) + sigma_c*zvals; kvals = mu_k*ones(size(zvals)) + sigma_k*zvals;
Constuct the Hermite polynomials H_0, H_1 and H_2 evaluated at the quadrature points zvals. Also construct the coefficients h0, h1 and h2 used to construct gamma_k.
poly0 = ones(1,M); % H_0(q) = 1 poly1 = zvals; % H_1(q) = q poly2 = zvals.^2 - ones(1,M); % H_2(q) = q^2 - 1 h0 = factorial(0); h1 = factorial(1); h2 = factorial(2); y_k0 = zeros(1,N_omega); y_k1 = zeros(1,N_omega); y_k2 = zeros(1,N_omega); y_k3 = zeros(1,N_omega); y_k4 = zeros(1,N_omega); y_k5 = zeros(1,N_omega); y_k6 = zeros(1,N_omega); y_k7 = zeros(1,N_omega); y_k8 = zeros(1,N_omega); y_k9 = zeros(1,N_omega);
Compute the deterministic, Monte Carlo and discrete projection values at each of values omega_F.
for k = 1:N_omega deterministic(k) = 1/sqrt((mu_k-mu_m*omega(k)^2)^2 + (mu_c*omega(k))^2); % Deterministic solution MC = 1./sqrt((q(:,3)-q(:,1)*omega(k)^2).^2 + (q(:,2)*omega(k)).^2); % Monte Carlo samples MC_mean(k) = (1/N_MC)*sum(MC); % MC mean tmp = 0; for j=1:N_MC tmp = tmp + (MC(j) - MC_mean(k))^2; end MC_sigma(k) = sqrt((1/(N_MC-1))*tmp); for j1 = 1:M for j2 = 1:M for j3 = 1:M denom = (kvals(j2) - mvals(j1)*omega(k)^2)^2 + (cvals(j3)*omega(k))^2; yval = 1/sqrt(denom); y_k0(k) = y_k0(k) + (1/(h0*h0*h0))*yval*poly0(j1)*poly0(j2)*poly0(j3)*weights(j1)*weights(j2)*weights(j3); y_k1(k) = y_k1(k) + (1/(h1*h0*h0))*yval*poly1(j1)*poly0(j2)*poly0(j3)*weights(j1)*weights(j2)*weights(j3); y_k2(k) = y_k2(k) + (1/(h0*h1*h0))*yval*poly0(j1)*poly1(j2)*poly0(j3)*weights(j1)*weights(j2)*weights(j3); y_k3(k) = y_k3(k) + (1/(h0*h0*h1))*yval*poly0(j1)*poly0(j2)*poly1(j3)*weights(j1)*weights(j2)*weights(j3); y_k4(k) = y_k4(k) + (1/(h2*h0*h0))*yval*poly2(j1)*poly0(j2)*poly0(j3)*weights(j1)*weights(j2)*weights(j3); y_k5(k) = y_k5(k) + (1/(h1*h1*h0))*yval*poly1(j1)*poly1(j2)*poly0(j3)*weights(j1)*weights(j2)*weights(j3); y_k6(k) = y_k6(k) + (1/(h1*h0*h1))*yval*poly1(j1)*poly0(j2)*poly1(j3)*weights(j1)*weights(j2)*weights(j3); y_k7(k) = y_k7(k) + (1/(h0*h2*h0))*yval*poly0(j1)*poly2(j2)*poly0(j3)*weights(j1)*weights(j2)*weights(j3); y_k8(k) = y_k8(k) + (1/(h0*h1*h1))*yval*poly0(j1)*poly1(j2)*poly1(j3)*weights(j1)*weights(j2)*weights(j3); y_k9(k) = y_k9(k) + (1/(h0*h0*h2))*yval*poly0(j1)*poly0(j2)*poly2(j3)*weights(j1)*weights(j2)*weights(j3); end end end end
Compute the mean and variance based on the generalized Fourier coefficients y_k.
Y_k = [y_k0; y_k1; y_k2; y_k3; y_k4; y_k5; y_k6; y_k7; y_k8; y_k9]; gamma = [h0*h0*h0 h1*h0*h0 h0*h1*h0 h0*h0*h1 h2*h0*h0 h1*h1*h0 h1*h0*h1 h0*h2*h0 h0*h1*h1 h0*h0*h2]; for n = 1:N_omega var_sum = 0; for j = 2:K+1 var_sum = var_sum + (Y_k(j,n)^2)*gamma(j); end var(n) = var_sum; end DP_mean = Y_k(1,:); % Discrete projection mean DP_sd = sqrt(var); % Discrete projection standard deviation
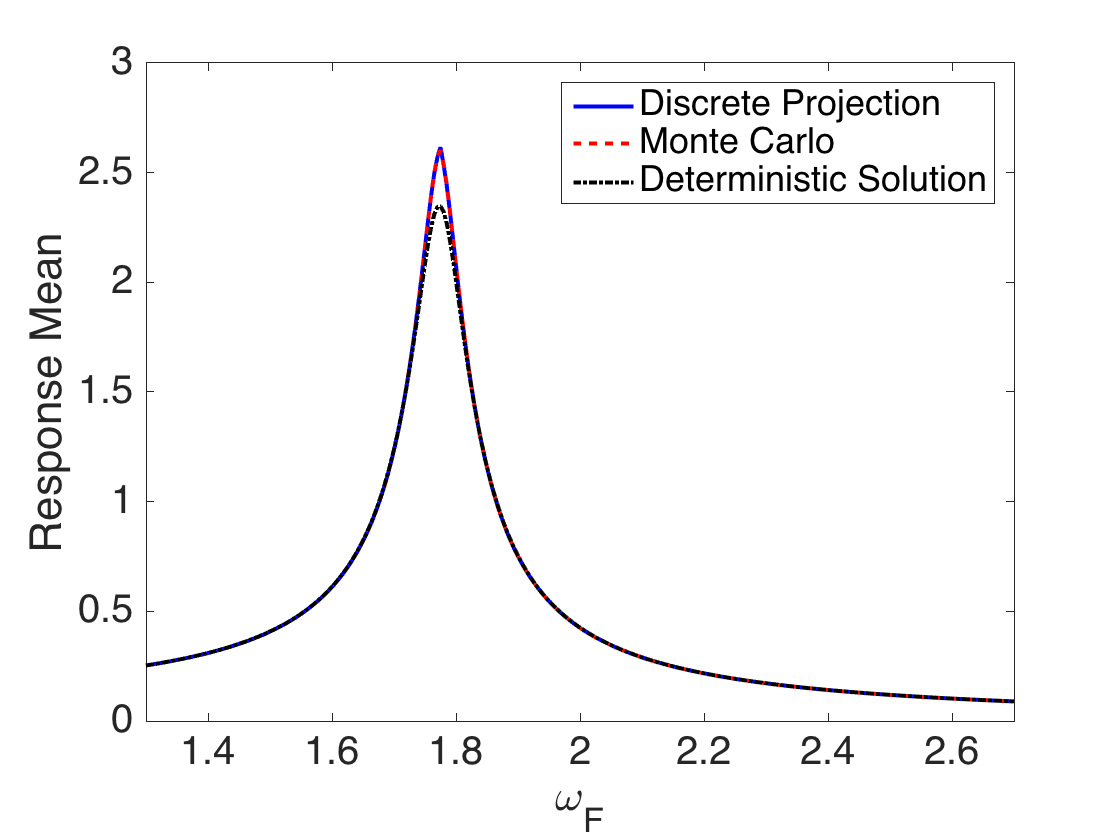
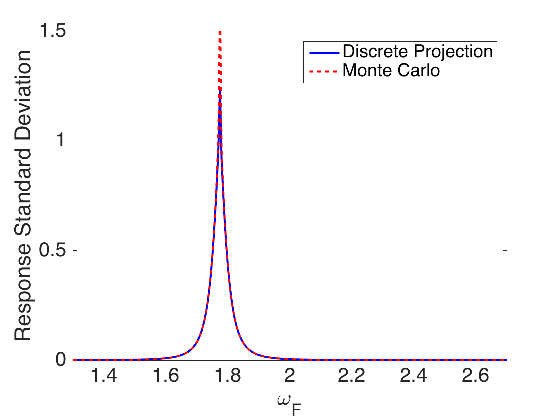
Plot the response mean and standard deviation as a function of the drive frequency omega_F.
figure(1) plot(omega,DP_mean,'b-',omega,MC_mean,'--r',omega,deterministic,'-.k','linewidth',2) axis([1.3 2.7 0 3]) set(gca,'Fontsize',[20]); xlabel('\omega_F') ylabel('Response Mean') legend('Discrete Projection','Monte Carlo','Deterministic Solution','Location','NorthEast') figure(2) plot(omega,DP_sd,'-b',omega,MC_sigma,'--r','linewidth',2) axis([1.3 2.7 0 1.5]) set(gca,'Fontsize',[20]); xlabel('\omega_F') ylabel('Response Standard Deviation') legend('Discrete Projection','Monte Carlo','Location','NorthEast')